![]()
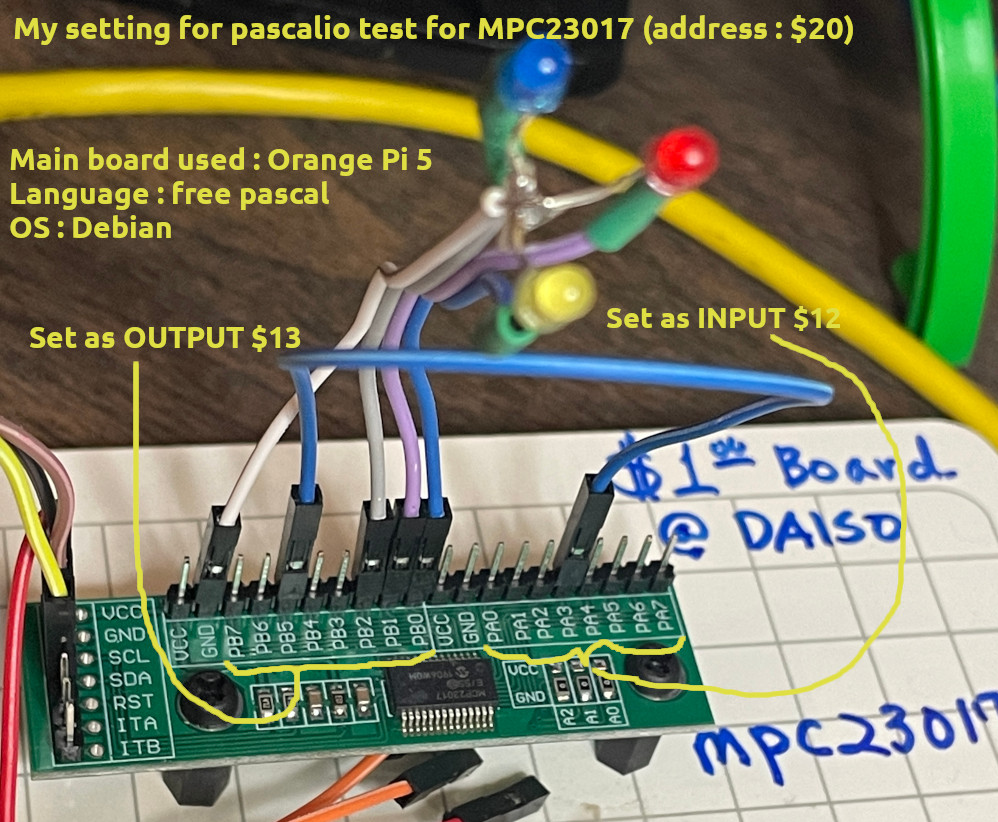
3. my note for pascalio with MCP23017 - 16 bit I/O expanding board.
2023.12.03 18:49
My note for pascalio/test/mcp23017_i2cdev/project1.lpr file
{
I have connected one of the pin of PortA to one of the pin on PortB.
Therefore, when one pin from portA is "ON" as output,
the other pin from PortB should be "ON" for input.
}
program project1;
{$mode objfpc}{$H+}
uses
sysutils,
pascalio, fpi2c
{ you can add units after this };
var
idev: TI2CLinuxDevice;
bval, b: Byte;
begin
idev := nil;
try
idev := TI2CLinuxDevice.Create($20, 1);
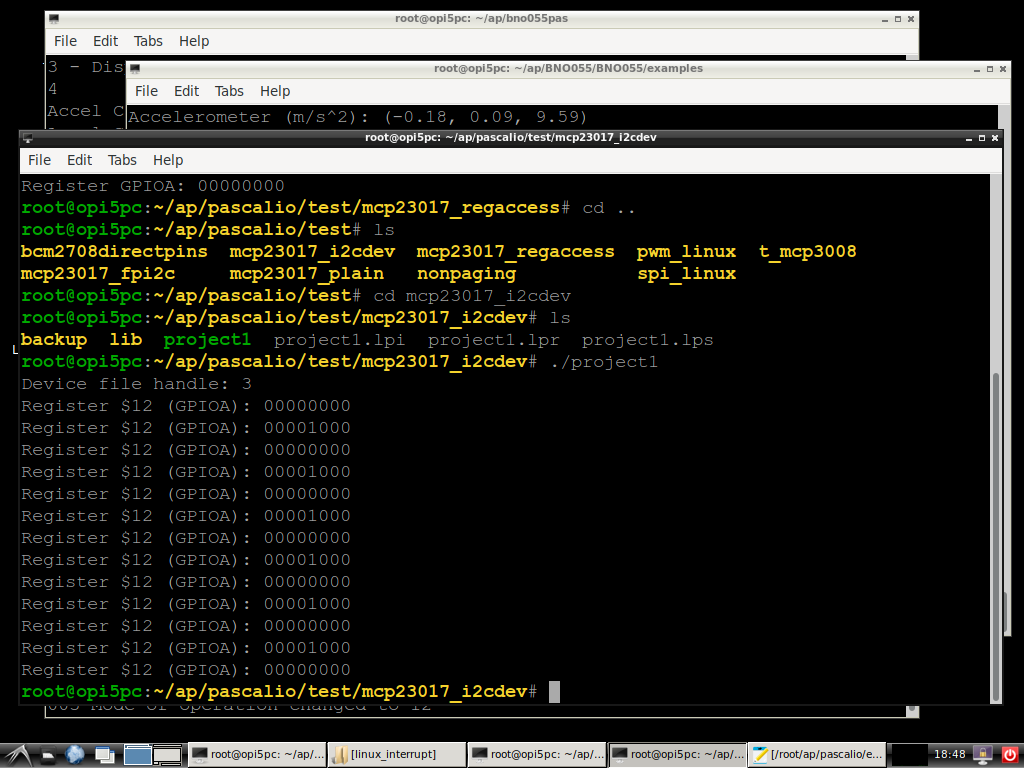
writeln('Device file handle: ', idev.Handle);
bval := idev.ReadRegByte($12);
Writeln('Register $12 (GPIOA): ', binstr(bval,8));
idev.WriteRegByte($01, $00); // GPIOB = Output
for bval := 0 to 5 do
begin
idev.WriteRegByte($13, $FF);
b := idev.ReadRegByte($12);
Writeln('Register $12 (GPIOA): ', binstr(b,8));
Sleep(1000);
idev.WriteRegByte($13, $00);
b := idev.ReadRegByte($12);
Writeln('Register $12 (GPIOA): ', binstr(b,8));
Sleep(1000);
end;
except
// this exception handling should be a try/finally block
// but FPC 2.7.1 doesn't do the default exception handling
// so this is workaround to avoid memory leaking the exception object
on e: exception do // Error Handling
begin
writeln(ErrOutput, 'E Class : ', e.ClassName);
writeln(ErrOutput, 'E Message: ', e.Message);
writeln(ErrOutput, 'E Address: ', hexStr(ExceptAddr));
end;
end;
idev.Free;
end.