
![]()
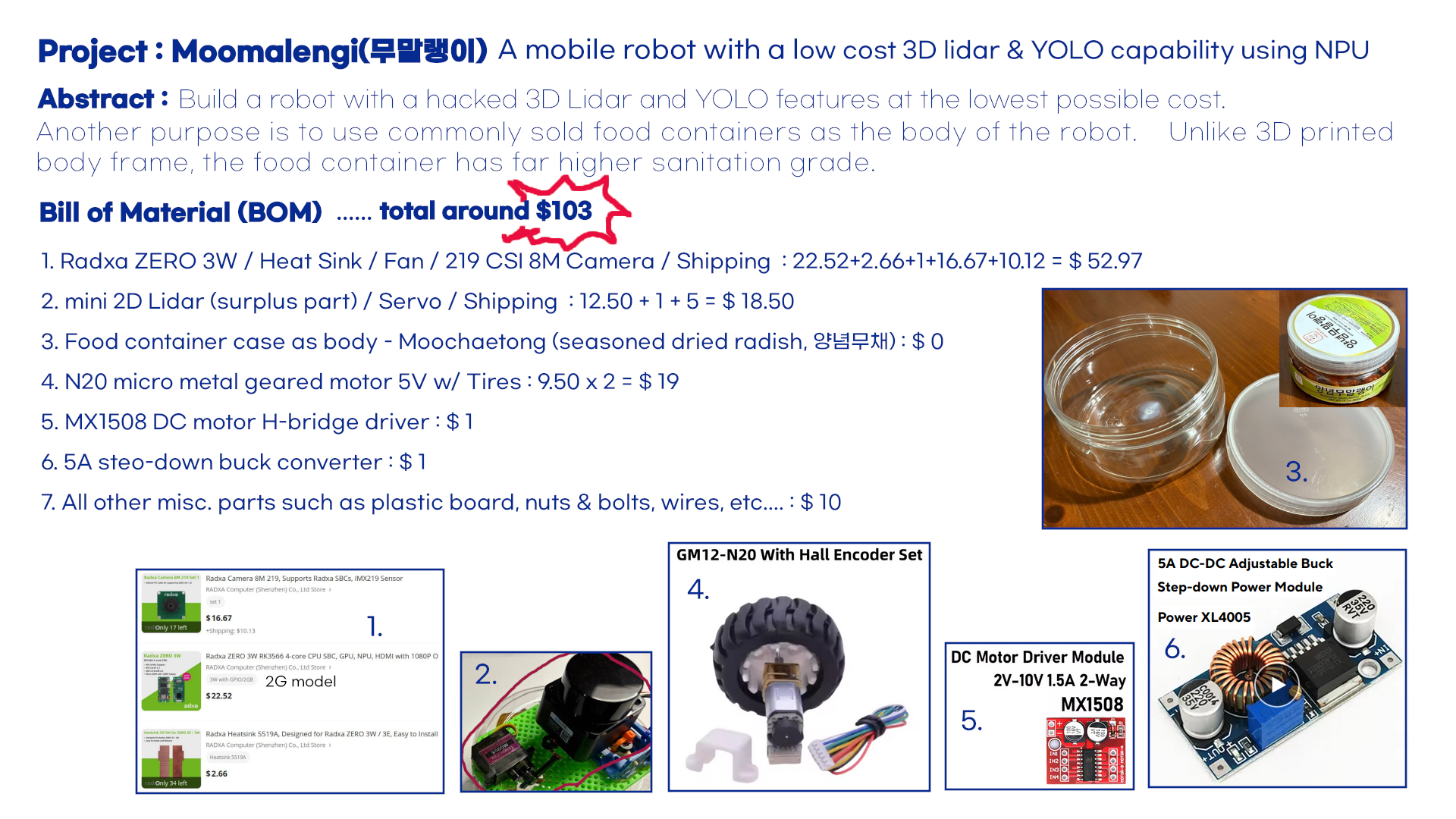
Project Moomalengi 무말랭이 (Seasoned Dried Radish)
2025.01.19 18:02
Project Start Date : Jan. 18, 2025
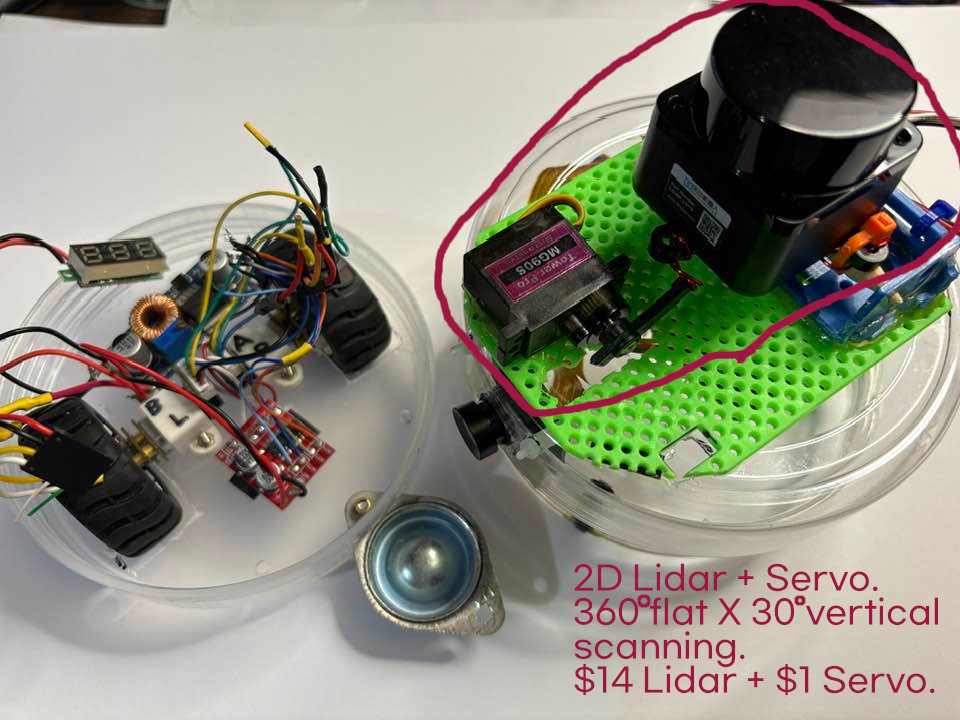
Current State : Parts are put into places.
To do :
1. Install OS to Radxa ZERO 3W in headless mode. (Done)
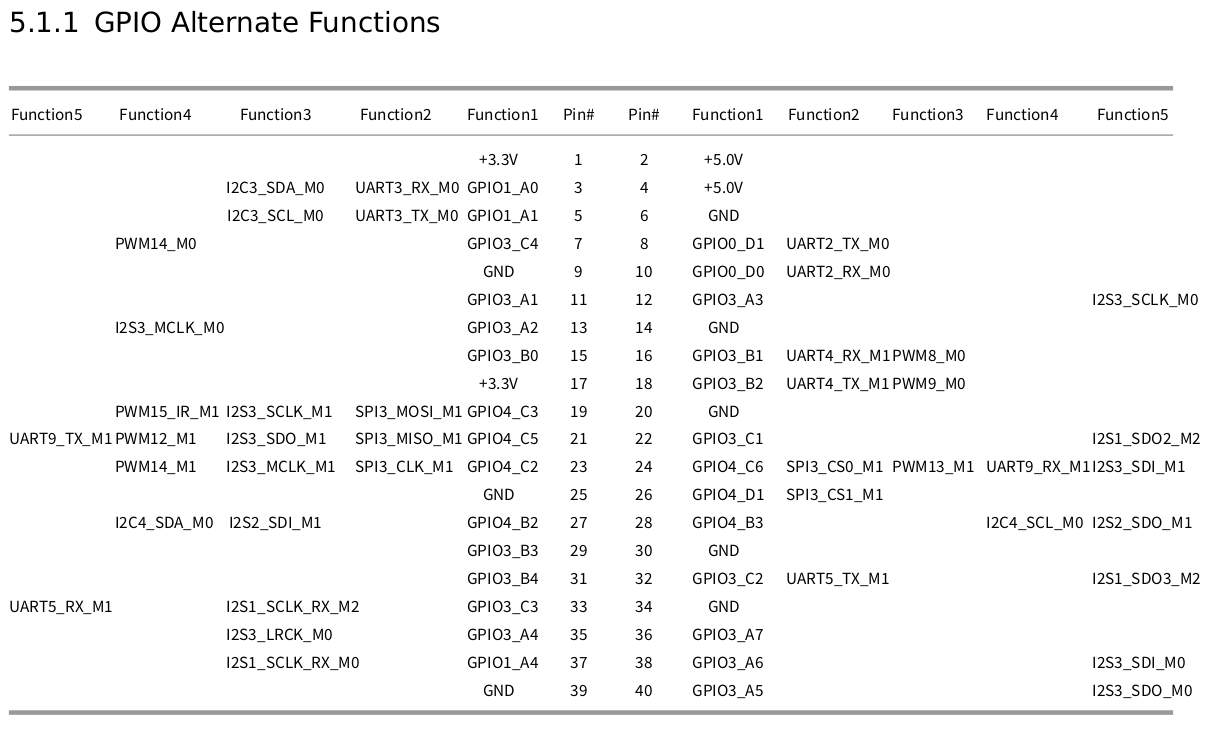
2. Test gpio, UART & PWM
3. Set pins for usage to control motion (gpio & PWM)
4. 2D Lidar function
5. with servo's 30 degree motion to 2D lidar, start gather 3D lidar data.
6. Start drawing the surrounding maps in 3D.
7. CSI Camera & YOLO functions.
8. Using YOLO, calculate object or a person's distance from robot.
My Setting done :
PWM9 (18)
PWM14_M0 (7)
UART9 (21tx, 24rx)
UART5 (33rx, 32tx)