
![]()
Ultrasonic with free pascal
2023.12.05 23:15
File : /pascalio/examples/ultrasonic/
(*) Result video of good/bad results are in attached files (*)
I believe the timer routine is not good. The result is not good also.
Therefore, I have changed all the time routines & recalculated distance value to match an actual ruler.
I have succeed on this.
{ Distance measurement with ultrasonic module HC-SR04
Copyright (C) 20104 Simon Ameis simon.ameis@web.de
Idea: http://www.gtkdb.de/index_36_2272.html
This library is free software; you can redistribute it and/or modify it
under the terms of the GNU Library General Public License as published by
the Free Software Foundation; either version 2 of the License, or (at your
option) any later version with the following modification:
As a special exception, the copyright holders of this library give you
permission to link this library with independent modules to produce an
executable, regardless of the license terms of these independent modules,and
to copy and distribute the resulting executable under terms of your choice,
provided that you also meet, for each linked independent module, the terms
and conditions of the license of that module. An independent module is a
module which is not derived from or based on this library. If you modify
this library, you may extend this exception to your version of the library,
but you are not obligated to do so. If you do not wish to do so, delete this
exception statement from your version.
This program is distributed in the hope that it will be useful, but WITHOUT
ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or
FITNESS FOR A PARTICULAR PURPOSE. See the GNU Library General Public License
for more details.
You should have received a copy of the GNU Library General Public License
along with this library; if not, write to the Free Software Foundation,
Inc., 59 Temple Place - Suite 330, Boston, MA 02111-1307, USA.
}
program ultrasonic;
uses sysutils, pascalio, fpgpio, baseunix, math;
const
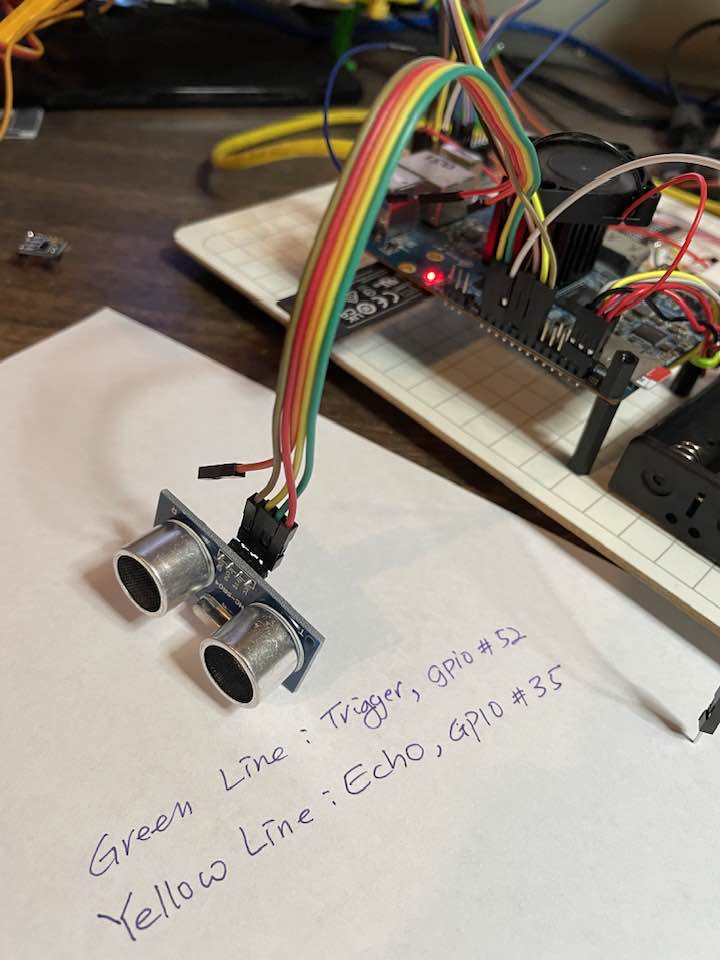
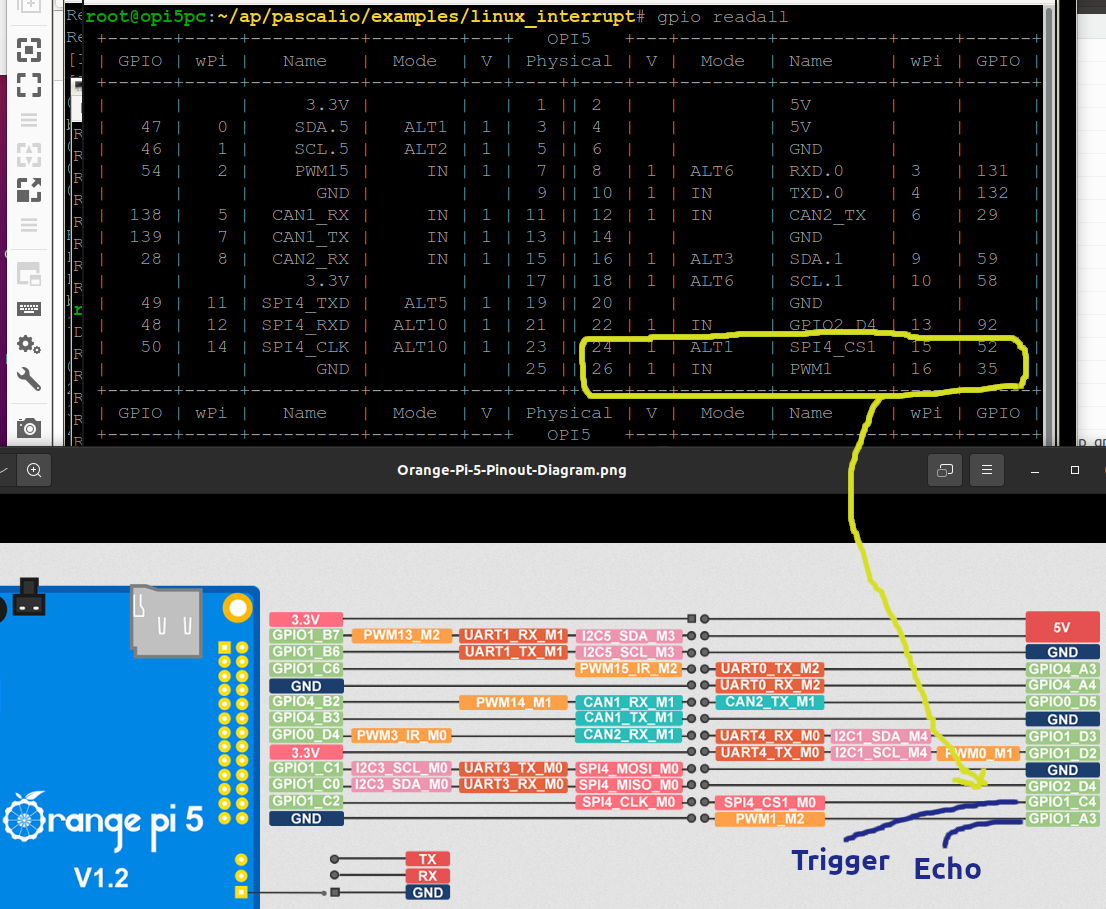
GPIO_TRIGGER = 52; // pin #24 on orange pi 5
GPIO_ECHO = 35; // pin #26 on orange pi 5
var
trigger : TGpioPin;
echo : TGpioPin;
distance : Double;
procedure DoSigInt(sig: cint); cdecl;
begin
Writeln('Signal ', sig, ' received.');
raise Exception.Create('Signal received.');
end;
function MeasureDistance: Double;
var
StartTime: TDateTime;
StopTime: TDateTime;
TimeElapsed: Extended;
begin
trigger.Value := True;
WriteLn(ErrOutput, 'TRIGGER set to: ', trigger.Value);
Sleep(100);
trigger.Value := False;
WriteLn(ErrOutput, 'TRIGGER set to: ', trigger.Value);
StartTime := Now;
while not echo.Value do
StartTime := Now;
while echo.Value do
StopTime := Now;
TimeElapsed := StopTime - StartTime;
Writeln(ErrOutput, ' StartTime: ', StartTime);
Writeln(ErrOutput, ' StopTime: ', StopTime);
Writeln(ErrOutput, 'TimeElapsed: ', TimeElapsed);
Writeln(ErrOutput, 'TimeElapsed: ', TimeElapsed *24*60*60*(10**6),'us');
Result := TimeElapsed * 24 * 60 * 60 * (10 ** 6) / 58;// 34300 / 2;
end;
begin
// Signal handler for SIG_INT (CTRL+C)
FpSignal(SIGINT, @DoSigInt);
// setup GPIO pins
trigger := TGpioLinuxPin.Create(GPIO_TRIGGER);
trigger.Direction := gdOut;
echo := TGpioLinuxPin.Create(GPIO_ECHO );
echo.Direction := gdIn;
try
while True do
begin
distance := MeasureDistance;
Writeln(Format('Measured Distance = %4.2f cm', [distance]));
FpSleep(1);
end;
except
on Exception do
WriteLn(ErrOutput, 'Terminated');
end;
trigger.Free;
echo.Free;
end.
== ABOVE HERE, IT PRODUCES BAD RESULT =========
========================================================================================
== BELOW HERE, IT PRODUCES GOOD RESULT WITH NEW MODIFIED TIME ROUTINES ===
program opi5_hc_sr04; // Modified by Henry Kim
uses sysutils, pascalio, fpgpio, baseunix, unix, math;
const
GPIO_TRIGGER = 52;
GPIO_ECHO = 35;
var
trigger : TGpioPin;
echo : TGpioPin;
distance : Double;
procedure millisecondSleep(const ms : real); // uses BaseUnix
var
// .1 millisecond level sleep (warning 70 microsecond overhead)
Reqested, Remaining : TimeSpec;
ResultVal : Longint;
NanoSecondVal : LongInt;
ErrorOverhead : LongInt = 70000; // 70 microsecond overhead
begin
// 1 milisecond = 1,000,000 nano second
NanoSecondVal := round(ms * 1000000 - ErrorOverhead);
// Here, enter time to sleep (seconds + nanoseconds)
with Reqested do begin
tv_sec := 0;
tv_nsec := NanoSecondVal; // 200 microseconds = .2 milliseconds
end;
// Sleep
ResultVal:=(fpNanoSleep(@Reqested,@Remaining));
if ResultVal <> 0 then begin
writeln('Remaining nanoseconds : ',Remaining.tv_nsec);
writeln('Remaining seconds : ',Remaining.tv_sec);
end;
end;
procedure DoSigInt(sig: cint); cdecl;
begin
Writeln('Signal ', sig, ' received.');
raise Exception.Create('Signal received.');
end;
function MeasureDistance: Double;
var
StartTime: TDateTime;
StopTime: TDateTime;
TimeElapsed: Extended;
tvprev, tvcur : timeval; // for fpgettimeofday
microgap : Longint;
begin
trigger.Value := True;
//WriteLn(ErrOutput, 'TRIGGER set to: ', trigger.Value);
// Sleep(100);
millisecondSleep(10);
trigger.Value := False;
//WriteLn(ErrOutput, 'TRIGGER set to: ', trigger.Value);
StartTime := Now;
while not echo.Value do
// StartTime := Now;
fpgettimeofday(@tvprev, nil);
while echo.Value do
// StopTime := Now;
fpgettimeofday(@tvcur, nil); // get timestamp AFTER sleep
// Get the gap only for microseconds which is my interest point.
microgap := tvcur.tv_usec - tvprev.tv_usec;
// TimeElapsed := StopTime - StartTime;
{ Writeln(ErrOutput, ' StartTime: ', StartTime);
Writeln(ErrOutput, ' StopTime: ', StopTime);
Writeln(ErrOutput, 'TimeElapsed: ', TimeElapsed);
Writeln(ErrOutput, 'TimeElapsed: ', TimeElapsed *24*60*60*(10**6),'us');
}
// Result := TimeElapsed * 24 * 60 * 60 * (10 ** 6) / 58;// 34300 / 2;
Result := microgap / 60;
end;
begin
// Signal handler for SIG_INT (CTRL+C)
FpSignal(SIGINT, @DoSigInt);
// setup GPIO pins
trigger := TGpioLinuxPin.Create(GPIO_TRIGGER);
trigger.Direction := gdOut;
echo := TGpioLinuxPin.Create(GPIO_ECHO );
echo.Direction := gdIn;
try
while True do begin
distance := MeasureDistance;
Writeln(Format('Measured Distance = %4.2f cm', [distance]));
//FpSleep(1);
Sleep(200);
end;
except
on Exception do
WriteLn(ErrOutput, 'Terminated');
end;
trigger.Free;
echo.Free;
end.